Robots voladores diseñados buscando inspiración en el mundo animal, son hoy en día objeto de estudio de un gran número de investigaciones en ingeniería.
Y las razones que motivan esta euforia van más allá del simple hecho de tratarse de un tema fascinante para las mentes curiosas: no es un misterio, hay un gran número de aplicaciones prácticas para un robot volador.
Casi siempre se las puede uno arreglar para empezar un comentario citando el nombre de Leonardo da Vinci. Sobre todo cuando se trata de algo que tiene que ver con la ciencia y la ingeniería, como lo es el tema de las máquinas voladoras. Ocurre que Leonardo con su genio y sus múltiples oficios encarna en un solo personaje toda la cadena creativa que hoy en día es llevada a cabo por múltiples cabezas, especializadas, cada una en distintas partes de un problema. En el caso del vuelo bio-inspirado o bio-mimético, es decir, artificial, pero que toma algunos (o muchos) elementos de la naturaleza, todos hemos visto los diseños de máquinas voladoras de Leonardo. Está claro que una aguda observación de la naturaleza era una de las bases de su prolífica mente inventora [1]. Y después, indispensable, el oficio para poner en un croquis todos los elementos para la realización concreta de una idea. Las ideas de Leonardo en el tema apuntaban al objetivo aeronáutico de montarse en la máquina y poder volar, y estaban inspiradas en la observación de las aves. Pero había un problema de escala: los pájaros aleteando producen (utilizando los términos de la aeronáutica para las fuerzas) tanto el empuje como la sustentación, y en una máquina donde la potencia necesaria tendría que ser suministrada por el piloto (pedaleando, por ejemplo), el cuerpo humano se queda corto para hacer las veces de motor. Un poco más tarde, la historia llevó a desacoplar el empuje y la sustentación, usando un motor para producir lo primero, y un ala fija para lo segundo. De ahí, la aeronáutica ha evolucionado a lo que conocemos hoy.
¿Qué pensaría en la actualidad Leonardo Da Vinci del aleteo de insectos mecánicos voladores?
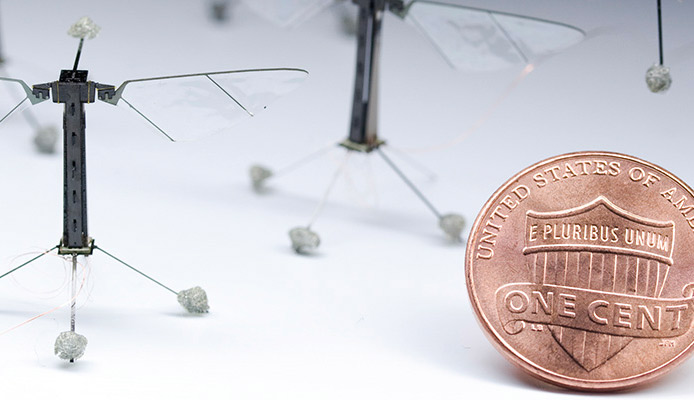
Dando un salto al presente, si bien una máquina con alas batientes para transporte humano sigue siendo hoy una curiosidad exótica [2], el aleteo está muy de moda en otro tipo de aplicaciones a escala más pequeña que se está haciendo realidad gracias al advenimiento de la miniaturización de sistemas complejos. Es un hecho que los ingenieros de hoy le llevan ya una buena ventaja a Leonardo en materia de herramientas disponibles para diseñar y armar robots que aletean. Pero el secreto está no solamente en tener las herramientas y saber usarlas, sino también en tener una buena idea de lo que se quiere hacer con ellas. Y aquí es donde aquello de observar atentamente la naturaleza y entender cómo es que funciona tan bien, puede ser útil. Si Leonardo viviera hoy, seguramente se habría entusiasmado leyendo el artículo de un equipo de la Universidad de Harvard publicado en Science recientemente que se trata de “insectos mecánicos voladores” [3]. El trabajo, cuyas imágenes ya han dado la vuelta al mundo, reporta el primer vuelo controlado de un pequeño robot alado, que visto de lejos podría pasar por un insecto volador (ver figura). No es el primer reporte de un robot que consigue un vuelo estable con aleteo, pero sí es el primero que tiene el tamaño de un insecto (mide unos 3 cm y pesa solamente 80 mg). Los “músculos” de este robot están constituidos por piezoeléctricos dimorfos (que pueden producir fuerzas bidireccionales y cuya geometría está optimizada para tener una alta densidad de energía). El pequeño desplazamiento producido por los piezoeléctricos es amplificado con un sistema de brazos de palanca que da lugar al movimiento de aleteo. Una bisagra elástica en cada articulación da un grado de libertad angular adicional a cada ala, permitiendo un aleteo similar al de los insectos por medio de una rotación pasiva –este tema está relacionado con una de las estrategias utilizadas por los insectos para optimizar el rendimiento aerodinámico, que es la elasticidad de las alas [4]–.
El éxito de estos primeros vuelos controlados es un aliento.
Estos pequeños robots aun vuelan atados a tierra por un cable que suministra la energía y la conexión a un controlador en el laboratorio. El tema del controlador ya es realizable en un sistema embarcado; por el contrario, el tema de la batería requiere aún de un salto tecnológico para poder suministrar la energía necesaria a partir del ínfimo espacio y peso disponible. De cualquier manera, el éxito de estos primeros vuelos controlados es un aliento no solamente para seguir investigando los aspectos científicos y tecnológicos ligados al vuelo bio-inspirado, sino también para reflexionar sobre lo que vamos a hacer cuando podamos soltar las amarras de una flota de insectos robot. Sería interesante escuchar la opinión de Leonardo sobre esto último… C2
Referencias:
[1] Aquí un ejemplo: http://it.wikipedia.org/wiki/Codice_sul_volo_degli_uccelli
[2] http://www.popularmechanics.com/technology/aviation/diy-flying/why-its-so-hard-to-build-a-human-powered-winged-aircraft-7539894
[3] Ma, K.Y. et al., 2013. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Science, 340(6132), pp.603–607. (Ver también la nota en “News & Views” de Nature el 20 de junio de 2013). Video: http://www.sciencemag.org/content/suppl/2013/05/01/340.6132.603.DC1/1231806s2.mov
[4] Ramananarivo, S., Godoy-Diana, R. & Thiria, B., 2011. Rather than resonance, flapping wing flyers may play on aerodynamics to improve performance. Proceedings of the National Academy of Sciences, 108(15), pp.5964–5969.
{kind=link}
{kind=link}
{kind=link}